This project focuses on the design and evolution of a high-precision RTK GNSS base station for
autonomous agricultural robotics. Development began on a Raspberry Pi–based prototype using u-blox
F9P GNSS receivers to validate correction accuracy, reliability, and end-to-end data flow. As the
system matured, the architecture transitioned toward a dedicated embedded platform, exploring
ESP32-S3–based implementations to improve reliability, power efficiency, and deployability in field
environments.
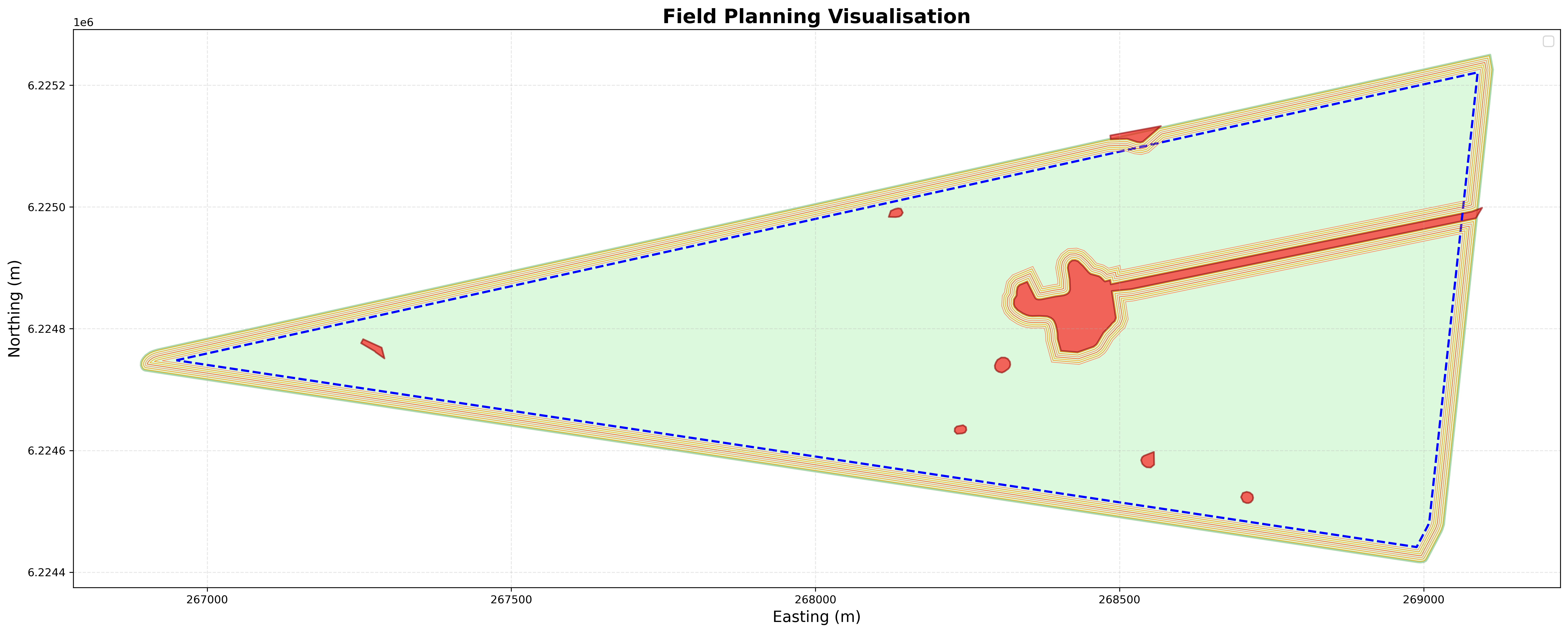
The base station delivers centimetre-level positioning across large agricultural areas, providing
RTK corrections to autonomous rovers for accurate navigation and repeatable field operations.
Real-time correction data is distributed over 4G cellular connectivity using NTRIP, with Cloudflare
tunnels used to securely expose services without reliance on traditional radio links or
line-of-sight constraints.
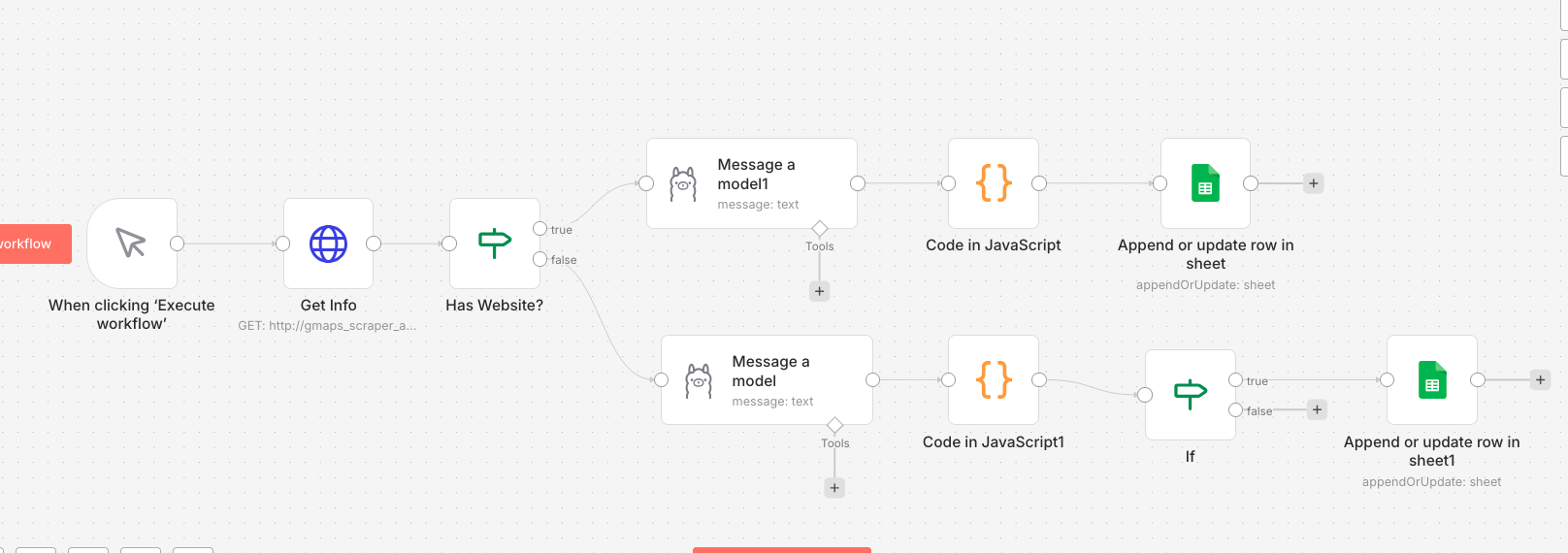
Key technical work includes custom firmware and software to manage RTCM3 correction streams, NTRIP
client and server workflows, and robust monitoring for continuous operation. Ongoing development is
focused on migrating core functionality from the Raspberry Pi to ESP32-based hardware, reducing
system complexity while maintaining accuracy, uptime, and scalability across multiple rovers and
deployments.